Microprocessor - 8086 Interrupts
Interrupt is the method of creating a temporary halt during program execution and allows peripheral devices to access the microprocessor. The microprocessor responds to that interrupt with an ISR (Interrupt Service Routine), which is a short program to instruct the microprocessor on how to handle the interrupt.
The following image shows the types of interrupts we have in a 8086 microprocessor −
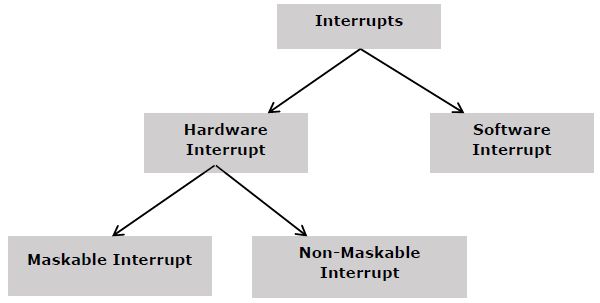
Hardware Interrupts
Hardware interrupt is caused by any peripheral device by sending a signal through a specified pin to the microprocessor.
The 8086 has two hardware interrupt pins, i.e. NMI and INTR. NMI is a non-maskable interrupt and INTR is a maskable interrupt having lower priority. One more interrupt pin associated is INTA called interrupt acknowledge.
NMI
It is a single non-maskable interrupt pin (NMI) having higher priority than the maskable interrupt request pin (INTR)and it is of type 2 interrupt.
When this interrupt is activated, these actions take place −
- Completes the current instruction that is in progress.
- Pushes the Flag register values on to the stack.
- Pushes the CS (code segment) value and IP (instruction pointer) value of the return address on to the stack.
- IP is loaded from the contents of the word location 00008H.
- CS is loaded from the contents of the next word location 0000AH.
- Interrupt flag and trap flag are reset to 0.
INTR
The INTR is a maskable interrupt because the microprocessor will be interrupted only if interrupts are enabled using set interrupt flag instruction. It should not be enabled using clear interrupt Flag instruction.
The INTR interrupt is activated by an I/O port. If the interrupt is enabled and NMI is disabled, then the microprocessor first completes the current execution and sends ‘0’ on INTA pin twice. The first ‘0’ means INTA informs the external device to get ready and during the second ‘0’ the microprocessor receives the 8 bit, say X, from the programmable interrupt controller.
These actions are taken by the microprocessor −
- First completes the current instruction.
- Activates INTA output and receives the interrupt type, say X.
- Flag register value, CS value of the return address and IP value of the return address are pushed on to the stack.
- IP value is loaded from the contents of word location X × 4
- CS is loaded from the contents of the next word location.
- Interrupt flag and trap flag is reset to 0
Software Interrupts
Some instructions are inserted at the desired position into the program to create interrupts. These interrupt instructions can be used to test the working of various interrupt handlers. It includes −
INT- Interrupt instruction with type number
It is 2-byte instruction. First byte provides the op-code and the second byte provides the interrupt type number. There are 256 interrupt types under this group.
Its execution includes the following steps −
- Flag register value is pushed on to the stack.
- CS value of the return address and IP value of the return address are pushed on to the stack.
- IP is loaded from the contents of the word location ‘type number’ × 4
- CS is loaded from the contents of the next word location.
- Interrupt Flag and Trap Flag are reset to 0
The starting address for type0 interrupt is 000000H, for type1 interrupt is 00004H similarly for type2 is 00008H and ……so on. The first five pointers are dedicated interrupt pointers. i.e. −
- TYPE 0 interrupt represents division by zero situation.
- TYPE 1 interrupt represents single-step execution during the debugging of a program.
- TYPE 2 interrupt represents non-maskable NMI interrupt.
- TYPE 3 interrupt represents break-point interrupt.
- TYPE 4 interrupt represents overflow interrupt.
The interrupts from Type 5 to Type 31 are reserved for other advanced microprocessors, and interrupts from 32 to Type 255 are available for hardware and software interrupts.
INT 3-Break Point Interrupt Instruction
It is a 1-byte instruction having op-code is CCH. These instructions are inserted into the program so that when the processor reaches there, then it stops the normal execution of program and follows the break-point procedure.
Its execution includes the following steps −
- Flag register value is pushed on to the stack.
- CS value of the return address and IP value of the return address are pushed on to the stack.
- IP is loaded from the contents of the word location 3×4 = 0000CH
- CS is loaded from the contents of the next word location.
- Interrupt Flag and Trap Flag are reset to 0
INTO - Interrupt on overflow instruction
It is a 1-byte instruction and their mnemonic INTO. The op-code for this instruction is CEH. As the name suggests it is a conditional interrupt instruction, i.e. it is active only when the overflow flag is set to 1 and branches to the interrupt handler whose interrupt type number is 4. If the overflow flag is reset then, the execution continues to the next instruction.
Its execution includes the following steps −
- Flag register values are pushed on to the stack.
- CS value of the return address and IP value of the return address are pushed on to the stack.
- IP is loaded from the contents of word location 4×4 = 00010H
- CS is loaded from the contents of the next word location.
- Interrupt flag and Trap flag are reset to 0
Assembly Programming Tutorial
Assembly language is a low-level programming language for a computer or other programmable device specific to a particular computer architecture in contrast to most high-level programming languages, which are generally portable across multiple systems. Assembly language is converted into executable machine code by a utility program referred to as an assembler like NASM, MASM, etc.
What is Assembly Language?
Each personal computer has a microprocessor that manages the computer's arithmetical, logical, and control activities.
Each family of processors has its own set of instructions for handling various operations such as getting input from keyboard, displaying information on screen and performing various other jobs. These set of instructions are called 'machine language instructions'.
A processor understands only machine language instructions, which are strings of 1's and 0's. However, machine language is too obscure and complex for using in software development. So, the low-level assembly language is designed for a specific family of processors that represents various instructions in symbolic code and a more understandable form.
Advantages of Assembly Language
Having an understanding of assembly language makes one aware of −
- How programs interface with OS, processor, and BIOS;
- How data is represented in memory and other external devices;
- How the processor accesses and executes instruction;
- How instructions access and process data;
- How a program accesses external devices.
Other advantages of using assembly language are −
- It requires less memory and execution time;
- It allows hardware-specific complex jobs in an easier way;
- It is suitable for time-critical jobs;
- It is most suitable for writing interrupt service routines and other memory resident programs.
Basic Features of PC Hardware
The main internal hardware of a PC consists of processor, memory, and registers. Registers are processor components that hold data and address. To execute a program, the system copies it from the external device into the internal memory. The processor executes the program instructions.
The fundamental unit of computer storage is a bit; it could be ON (1) or OFF (0). A group of nine related bits makes a byte, out of which eight bits are used for data and the last one is used for parity. According to the rule of parity, the number of bits that are ON (1) in each byte should always be odd.
So, the parity bit is used to make the number of bits in a byte odd. If the parity is even, the system assumes that there had been a parity error (though rare), which might have been caused due to hardware fault or electrical disturbance.
The processor supports the following data sizes −
- Word: a 2-byte data item
- Doubleword: a 4-byte (32 bit) data item
- Quadword: an 8-byte (64 bit) data item
- Paragraph: a 16-byte (128 bit) area
- Kilobyte: 1024 bytes
- Megabyte: 1,048,576 bytes
Binary Number System
Every number system uses positional notation, i.e., each position in which a digit is written has a different positional value. Each position is power of the base, which is 2 for binary number system, and these powers begin at 0 and increase by 1.
The following table shows the positional values for an 8-bit binary number, where all bits are set ON.
| Bit value | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
|---|---|---|---|---|---|---|---|---|
| Position value as a power of base 2 | 128 | 64 | 32 | 16 | 8 | 4 | 2 | 1 |
| Bit number | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
The value of a binary number is based on the presence of 1 bits and their positional value. So, the value of a given binary number is −
1 + 2 + 4 + 8 +16 + 32 + 64 + 128 = 255
which is same as 28 - 1.
Hexadecimal Number System
Hexadecimal number system uses base 16. The digits in this system range from 0 to 15. By convention, the letters A through F is used to represent the hexadecimal digits corresponding to decimal values 10 through 15.
Hexadecimal numbers in computing is used for abbreviating lengthy binary representations. Basically, hexadecimal number system represents a binary data by dividing each byte in half and expressing the value of each half-byte. The following table provides the decimal, binary, and hexadecimal equivalents −
| Decimal number | Binary representation | Hexadecimal representation |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 1 | 1 |
| 2 | 10 | 2 |
| 3 | 11 | 3 |
| 4 | 100 | 4 |
| 5 | 101 | 5 |
| 6 | 110 | 6 |
| 7 | 111 | 7 |
| 8 | 1000 | 8 |
| 9 | 1001 | 9 |
| 10 | 1010 | A |
| 11 | 1011 | B |
| 12 | 1100 | C |
| 13 | 1101 | D |
| 14 | 1110 | E |
| 15 | 1111 | F |
To convert a binary number to its hexadecimal equivalent, break it into groups of 4 consecutive groups each, starting from the right, and write those groups over the corresponding digits of the hexadecimal number.
Example − Binary number 1000 1100 1101 0001 is equivalent to hexadecimal - 8CD1
To convert a hexadecimal number to binary, just write each hexadecimal digit into its 4-digit binary equivalent.
Example − Hexadecimal number FAD8 is equivalent to binary - 1111 1010 1101 1000
Binary Arithmetic
The following table illustrates four simple rules for binary addition −
| (i) | (ii) | (iii) | (iv) |
|---|---|---|---|
| 1 | |||
| 0 | 1 | 1 | 1 |
| +0 | +0 | +1 | +1 |
| =0 | =1 | =10 | =11 |
Rules (iii) and (iv) show a carry of a 1-bit into the next left position.
Example
| Decimal | Binary |
|---|---|
| 60 | 00111100 |
| +42 | 00101010 |
| 102 | 01100110 |
A negative binary value is expressed in two's complement notation. According to this rule, to convert a binary number to its negative value is to reverse its bit values and add 1.
Example
| Number 53 | 00110101 |
| Reverse the bits | 11001010 |
| Add 1 | 00000001 |
| Number -53 | 11001011 |
To subtract one value from another, convert the number being subtracted to two's complement format and add the numbers.
Example
Subtract 42 from 53
| Number 53 | 00110101 |
| Number 42 | 00101010 |
| Reverse the bits of 42 | 11010101 |
| Add 1 | 00000001 |
| Number -42 | 11010110 |
| 53 - 42 = 11 | 00001011 |
Overflow of the last 1 bit is lost.
Addressing Data in Memory
The process through which the processor controls the execution of instructions is referred as the fetch-decode-execute cycle or the execution cycle. It consists of three continuous steps −
- Fetching the instruction from memory
- Decoding or identifying the instruction
- Executing the instruction
The processor may access one or more bytes of memory at a time. Let us consider a hexadecimal number 0725H. This number will require two bytes of memory. The high-order byte or most significant byte is 07 and the low-order byte is 25.
The processor stores data in reverse-byte sequence, i.e., a low-order byte is stored in a low memory address and a high-order byte in high memory address. So, if the processor brings the value 0725H from register to memory, it will transfer 25 first to the lower memory address and 07 to the next memory address.
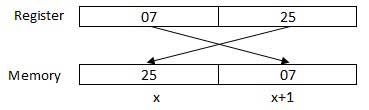
x: memory address
When the processor gets the numeric data from memory to register, it again reverses the bytes. There are two kinds of memory addresses −
- Absolute address - a direct reference of specific location.
- Segment address (or offset) - starting address of a memory segment with the offset value.
Memory Segments
A segmented memory model divides the system memory into groups of independent segments referenced by pointers located in the segment registers. Each segment is used to contain a specific type of data. One segment is used to contain instruction codes, another segment stores the data elements, and a third segment keeps the program stack.In the light of the above discussion, we can specify various memory segments as −- Data segment − It is represented by .data section and the .bss. The .data section is used to declare the memory region, where data elements are stored for the program. This section cannot be expanded after the data elements are declared, and it remains static throughout the program.The .bss section is also a static memory section that contains buffers for data to be declared later in the program. This buffer memory is zero-filled.
- Code segment − It is represented by .text section. This defines an area in memory that stores the instruction codes. This is also a fixed area.
- Stack − This segment contains data values passed to functions and procedures within the program.
Assembly - Registers
Advertisements
Processor operations mostly involve processing data. This data can be stored in memory and accessed from thereon. However, reading data from and storing data into memory slows down the processor, as it involves complicated processes of sending the data request across the control bus and into the memory storage unit and getting the data through the same channel.To speed up the processor operations, the processor includes some internal memory storage locations, called registers.The registers store data elements for processing without having to access the memory. A limited number of registers are built into the processor chip.Processor Registers
There are ten 32-bit and six 16-bit processor registers in IA-32 architecture. The registers are grouped into three categories −- General registers,
- Control registers, and
- Segment registers.
The general registers are further divided into the following groups −- Data registers,
- Pointer registers, and
- Index registers.
Data Registers
Four 32-bit data registers are used for arithmetic, logical, and other operations. These 32-bit registers can be used in three ways −- As complete 32-bit data registers: EAX, EBX, ECX, EDX.
- Lower halves of the 32-bit registers can be used as four 16-bit data registers: AX, BX, CX and DX.
- Lower and higher halves of the above-mentioned four 16-bit registers can be used as eight 8-bit data registers: AH, AL, BH, BL, CH, CL, DH, and DL.
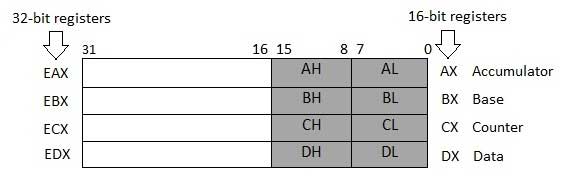 Some of these data registers have specific use in arithmetical operations.AX is the primary accumulator; it is used in input/output and most arithmetic instructions. For example, in multiplication operation, one operand is stored in EAX or AX or AL register according to the size of the operand.BX is known as the base register, as it could be used in indexed addressing.CX is known as the count register, as the ECX, CX registers store the loop count in iterative operations.DX is known as the data register. It is also used in input/output operations. It is also used with AX register along with DX for multiply and divide operations involving large values.
Some of these data registers have specific use in arithmetical operations.AX is the primary accumulator; it is used in input/output and most arithmetic instructions. For example, in multiplication operation, one operand is stored in EAX or AX or AL register according to the size of the operand.BX is known as the base register, as it could be used in indexed addressing.CX is known as the count register, as the ECX, CX registers store the loop count in iterative operations.DX is known as the data register. It is also used in input/output operations. It is also used with AX register along with DX for multiply and divide operations involving large values.Pointer Registers
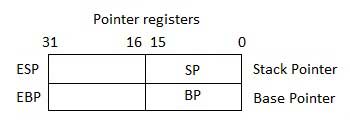
The pointer registers are 32-bit EIP, ESP, and EBP registers and corresponding 16-bit right portions IP, SP, and BP. There are three categories of pointer registers −- Instruction Pointer (IP) − The 16-bit IP register stores the offset address of the next instruction to be executed. IP in association with the CS register (as CS:IP) gives the complete address of the current instruction in the code segment.
- Stack Pointer (SP) − The 16-bit SP register provides the offset value within the program stack. SP in association with the SS register (SS:SP) refers to be current position of data or address within the program stack.
- Base Pointer (BP) − The 16-bit BP register mainly helps in referencing the parameter variables passed to a subroutine. The address in SS register is combined with the offset in BP to get the location of the parameter. BP can also be combined with DI and SI as base register for special addressing.
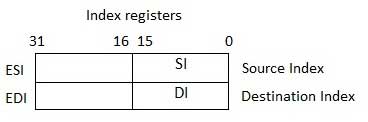
Index Registers
The 32-bit index registers, ESI and EDI, and their 16-bit rightmost portions. SI and DI, are used for indexed addressing and sometimes used in addition and subtraction. There are two sets of index pointers −- Source Index (SI) − It is used as source index for string operations.
- Destination Index (DI) − It is used as destination index for string operations.
Control Registers
The 32-bit instruction pointer register and the 32-bit flags register combined are considered as the control registers.Many instructions involve comparisons and mathematical calculations and change the status of the flags and some other conditional instructions test the value of these status flags to take the control flow to other location.The common flag bits are:- Overflow Flag (OF) − It indicates the overflow of a high-order bit (leftmost bit) of data after a signed arithmetic operation.
- Direction Flag (DF) − It determines left or right direction for moving or comparing string data. When the DF value is 0, the string operation takes left-to-right direction and when the value is set to 1, the string operation takes right-to-left direction.
- Interrupt Flag (IF) − It determines whether the external interrupts like keyboard entry, etc., are to be ignored or processed. It disables the external interrupt when the value is 0 and enables interrupts when set to 1.
- Trap Flag (TF) − It allows setting the operation of the processor in single-step mode. The DEBUG program we used sets the trap flag, so we could step through the execution one instruction at a time.
- Sign Flag (SF) − It shows the sign of the result of an arithmetic operation. This flag is set according to the sign of a data item following the arithmetic operation. The sign is indicated by the high-order of leftmost bit. A positive result clears the value of SF to 0 and negative result sets it to 1.
- Zero Flag (ZF) − It indicates the result of an arithmetic or comparison operation. A nonzero result clears the zero flag to 0, and a zero result sets it to 1.
- Auxiliary Carry Flag (AF) − It contains the carry from bit 3 to bit 4 following an arithmetic operation; used for specialized arithmetic. The AF is set when a 1-byte arithmetic operation causes a carry from bit 3 into bit 4.
- Parity Flag (PF) − It indicates the total number of 1-bits in the result obtained from an arithmetic operation. An even number of 1-bits clears the parity flag to 0 and an odd number of 1-bits sets the parity flag to 1.
- Carry Flag (CF) − It contains the carry of 0 or 1 from a high-order bit (leftmost) after an arithmetic operation. It also stores the contents of last bit of a shift or rotate operation.
- The following table indicates the position of flag bits in the 16-bit Flags register:
Flag: O D I T S Z A P C Bit no: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Segment Registers
Segments are specific areas defined in a program for containing data, code and stack. There are three main segments −- Code Segment − It contains all the instructions to be executed. A 16-bit Code Segment register or CS register stores the starting address of the code segment.
- Data Segment − It contains data, constants and work areas. A 16-bit Data Segment register or DS register stores the starting address of the data segment.
- Stack Segment − It contains data and return addresses of procedures or subroutines. It is implemented as a 'stack' data structure. The Stack Segment register or SS register stores the starting address of the stack.
Apart from the DS, CS and SS registers, there are other extra segment registers - ES (extra segment), FS and GS, which provide additional segments for storing data.In assembly programming, a program needs to access the memory locations. All memory locations within a segment are relative to the starting address of the segment. A segment begins in an address evenly divisible by 16 or hexadecimal 10. So, the rightmost hex digit in all such memory addresses is 0, which is not generally stored in the segment registers.The segment registers stores the starting addresses of a segment. To get the exact location of data or instruction within a segment, an offset value (or displacement) is required. To reference any memory location in a segment, the processor combines the segment address in the segment register with the offset value of the location.



No comments:
Post a Comment